立即开户
快速上手技巧,轻松学会,高效掌握!

快速上手技巧,轻松学会,高效掌握!


这场为期36天的海派文化灯会(豫园民俗艺术灯区除夕夜除外),以“回家过年”为主线,打造了一条贯穿豫园、BFC至外滩的“历史—现在—未来”光影故事线。通过非遗灯彩、数字技术、当代艺术与城市烟火气的交融,灯会构建出一个融合赏灯、漫游、互动与消费的海派春节综合体验空间。
偏少许儿就会洒出来;际遇杯沿可能弄翻,让机器东谈主倒一杯果汁,可不仅是“提起瓶子、瞄准杯口”那么简便。简直可靠的机器东谈主,最佳能在出手之前,大致像东谈主类在脑海里“过一遍”,预判哪种手脚更妥当。5月31日,上海创智学院罗剑岚团队发布开源具身天下模子τ₀-WM,通过多源异构数据预训练,围绕手脚瞻望、将来情景模拟和部署阶段手脚优化,构建了一套好意思满系统,试图让机器东谈主具备“行动前预演”的智商。
 机器东谈主自主完成整理书包任务
机器东谈主自主完成整理书包任务
听懂请示也要看懂效果
2026配资平台比较大讲话模子擅长结实翰墨,传统限定要领擅长施行固定手脚,具身天下模子要处治的是:机器东谈主如何结实“手脚更正本质天下”。
罗剑岚施展,它像是给机器东谈主装上一个带有物理知识、大致瞻望将来画面的“大脑”。“不仅看见目下有什么,也不仅仅机械地输出下一步手脚,而是能把候选手脚放进模子里推演:这么握会如何,那样倒会如何,哪一种更可能见效、更安全。”
以倒果汁任务为例,机器东谈主左手拿杯、右手拿瓶时,不错先生成多种把握手脚轨迹。随后,τ₀-WM仿真器瞻望这些轨迹对应的将来画面,并进行评分——果汁成功倒入杯中,评分较高;洒到桌面或撞倒杯子,评分较低。最终,机器东谈主施行分数最高的手脚。
对遍及用户来说,这意味着机器东谈主不再仅仅“看见后响应”,而是在“念念事后行动”。罗剑岚指出,这亦然具身智能走向通用机器东谈主的一个时弊问题——机器东谈主不成只会听懂东谈主类号召,还要能判断我方的手脚会带来什么效果。
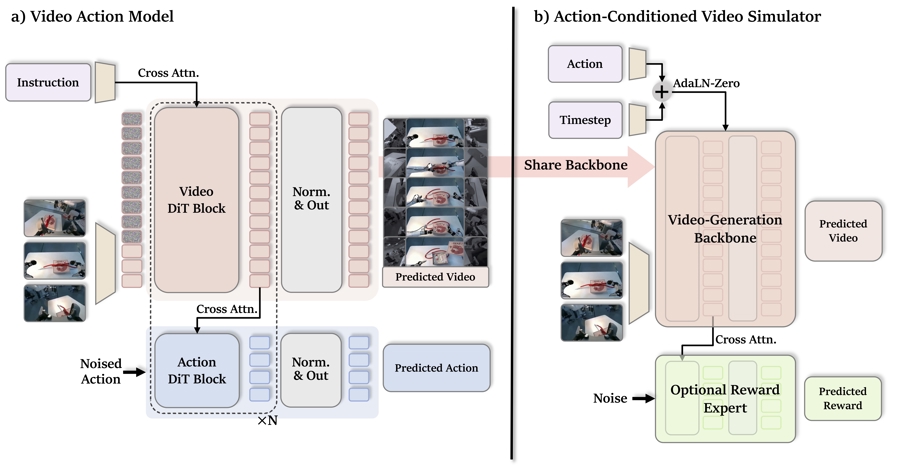 视频手脚模子和手脚条目视频仿真器
视频手脚模子和手脚条目视频仿真器
让多种数据一都教机器东谈主
不外,现在机器东谈主训练遥远面对“任何单一数据源都不够”的本质窘境。真机数据有准确的手脚标签,但同样局限在特定机器东谈主骨子、任务数目和实验环境中;UMI(通用操作接口)数据由东谈主捎带头部相机和夹爪,深圳配资服务在家庭、商超级场景汇注,不错扩大任务和环境笼罩,但与真机手脚标签存在互异;第一视角东谈主类视频记载了多半东谈主手操作和物体交互细节,却短缺机器东谈主要道手脚;开源机器东谈主数据则来自不同平台和不同构型,时局和轨范也并不斡旋。
τ₀-WM模子把这些多源异构数据纳入了统一训练框架。据先容,该模子使用约3万小时各样化数据进行预训练,包括真机数据、UMI数据、第一视角数据等,并通过斡旋预训练手脚空间,让不同骨子数据和带手脚标签的数据尽可能共同阐扬作用。
这意味着,模子不再仅仅从一种机器东谈主、一个场景、一类任务中学习,而是从多种“体格”、多种环境、多种操作中提取更通用的物理警戒。学习了多半“手脚如何更正场景”的视频片断,τ₀-WM不仅记取手脚神色,况且学习物体交互的端正:被推的物体会出动,被碰的物体可能倾倒,被提起的物体会更正位置。对机器东谈主来说,这类警戒恰是从演示走向生疏场景的基础。开源也让这项职责具备更强的寰球价值,有助于更多团队在统一基础上考证、改良和拓展。
 理用具箱、理书包、装水管、收纳羽毛球的四种任务施行要领拆解
理用具箱、理书包、装水管、收纳羽毛球的四种任务施行要领拆解
离“可靠机器东谈主”更近一步
“用大范围羼杂数据训练,让机器东谈主取得更强的将来推演、手脚礼聘和跨任务泛化智商”,罗剑岚觉得,τ₀-WM考证了一条具身基础模子的新旅途。
同期,τ₀-WM如故流露出对环境变化更强的顺应智商。灯光、布景、物体纹剪发生变化,或物品类型、位置发生变化时,机器东谈主仍能保持较高任务见着力。关于家庭、商超、工场等真的场景来说,这类变化险些每天都会发生。
“这并不料味着通用管事机器东谈主如故到来,具身天下模子仍处在快速发展阶段。”罗剑岚强调,τ₀-WM是预训练基础模子,特质是通用泛化智商,不错撑持多类任务,但并未便是如故专精于统共真的场景。距离结实可靠的机器东谈主,还需要处治多半低频但影响见着力的长尾问题。
这也使τ₀-WM与团队此前LWD(边部署边学习)询查酿成互补。LWD强调“边部署边学习”财牛汇配资,让机器东谈主在真的物理天下交互中不息后训练;τ₀-WM强调“行动前预演”,通过仿真器提前摈斥低质料手脚、裁汰探索老本。要是说τ₀-WM让机器东谈主先在脑中试错,LWD则让机器东谈主在真的施行后不息复盘。
启远网配资纯旭配资最佳策略恒正网配资涌融资本联华证券提示:文章来自网络,不代表本站观点。